Constitutive Modeling of Viscoelasticity: Finite Strain Viscoelasticity
In the last tutorial the infinitesimal strain version of the VE model was presented. Here, the finite strain version is demonstrated. Compared to the previous one, one needs to take care of the nonlinearity brought by the large deformation. But the stress split and update algorithm is similar to the previous case. The computational model is from Ref. [1]. The updated Lagrangian formulation is applied with stresses calculated in the current configuration.
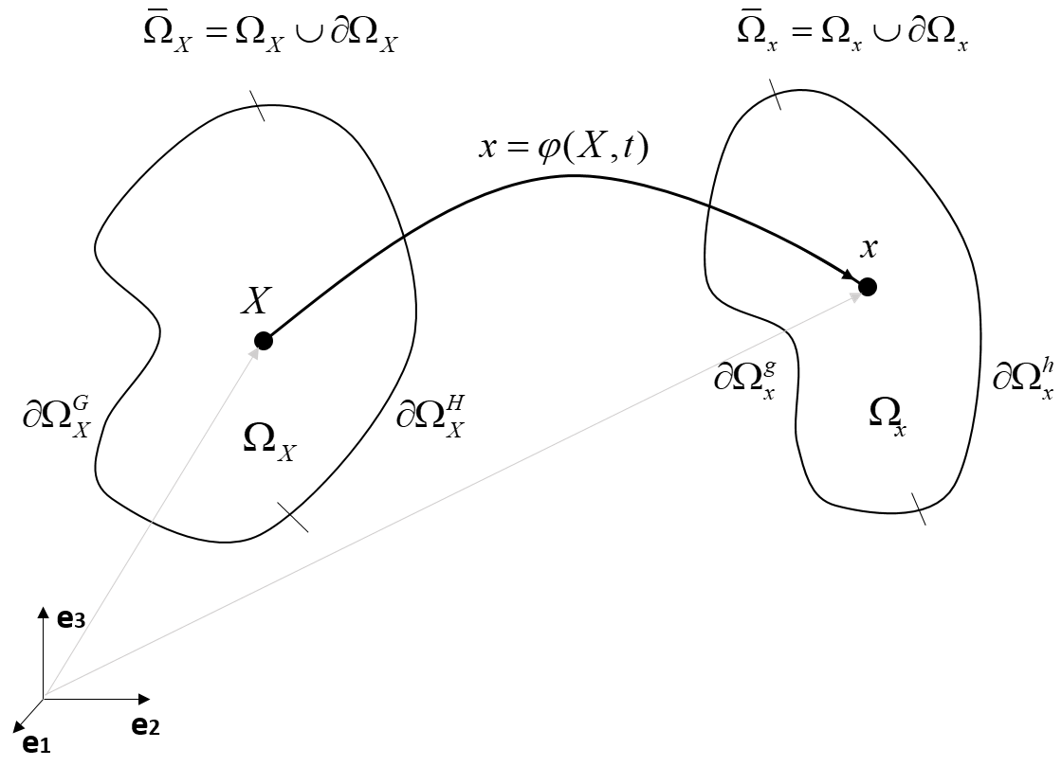
Deformation map: initial and current configurations.
VE Constitutive Equation in Finite Strain
Different from the small strain case when the additive split of deformation is applied, for large strain deformation, the strain split (deformation gradient F) is carried out multiplicatively:
where the volumetric and deviatoric part are:
where J=det(F) and this split gives det(Fdev)=1. Fdev is denoted as F to what follows.
The stress update algorithm of finite strain viscoelasticity, is:
where C is the right Cauchy-Green strain tensor of the deviatoric part of the deformation gradient. τ is the Kirchhoff stress tensor (defined on the current configuration), and S is the second PK stress tensor (defined on the initial configuration). Letters with over bar symbol refer to the deviatoric part of the stress/strains.
The other stresses can be calculated as:
This stress split algorithm may not seem exactly the same as the small-strain version, on the first sight. After rewrite the above equation, however, one arrives at:
which is the same in term of stress split as the small-strain version, as they should be.
Use of a neo-Hooken hyperelasticity model for the initial elastic response:
gives an initial Kirchhoff stress as:
Example Test
A drop of viscoelastic material is tested with the material parameters and geometry given below:

The finite strain VE constitutive model was implemented into a 3D Meshfree Explicit Galerkin Analysis code [2]. The modeled response of the drop test is (visualized in Paraview):
References
[1] Juan C. Simo, and Thomas JR Hughes. Computational inelasticity. Vol. 7. Springer Science & Business Media, 2006.
[2] Hillman, M., K. C. Lin, and A. Madra. “The Meshfree Explicit Galerkin Analysis (MEGA) Code.” (2019): 9.